


近日,我院安全科学与工程专业博士研究生王妙妙在多船时空交互感知与轨迹预测方法方面取得进展,相关研究《基于时空交错混合网络的交互感知和多模态分布用于船舶轨迹预测》(Interaction aware and multi-modal distribution for ship trajectory prediction with spatio-temporal crisscross hybrid network)发表在《Reliability Engineering and System Safety》。《Reliability Engineering and System Safety》是可靠性工程领域的国际顶级期刊,目前影响因子为9.4。论文第一作者为博士研究生王妙妙,通讯作者为王彦富教授,中国石油大学(华东)为第一署名单位和唯一通讯单位。该研究得到了国家自然科学基金资助支持。
论文首页
周围船舶的轨迹预测是船舶自主决策和执行系统的基础。未来的自动驾驶船舶将尝试消除人类参与,并独立做出一系列决策。在高度交互的交通场景中,船舶不仅需要响应当前的交通场景,还需要预测未来海上交通场景的演变,以实施正确的决策。然而,由于海上交通环境中船舶之间的复杂交互以及每艘船舶未来行为的不确定性,轨迹预测成为一项极具挑战性的任务。
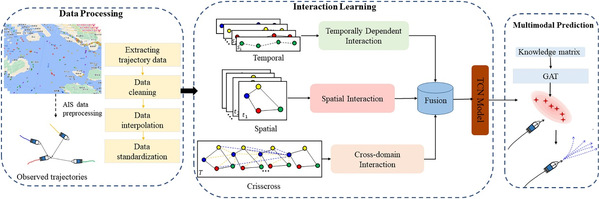
方法框架的流程图
为解决船舶轨迹复杂时空特征的学习问题,提出了一种基于时空交错混合网络的自适应学习框架,对周围船舶之间的动态交互进行建模,并从历史运动序列中学习隐藏的时空依赖性。此外,采用知识引导的采样策略,解决低概率模式被忽略的问题,有助于实现安全可靠的海上智能交通和安全决策。
论文链接:https://doi.org/10.1016/j.ress.2024.110463。
