


近日,我院崔俊国副教授团队在蚁群优化算法的改进及其在机器人路径规划算法应用方面取得重要进展,相关研究成果《多策略适应性蚁群优化算法及其在机器人路径规划中的应用》(Multi-strategy adaptable ant colony optimization algorithm and its application in robot path planning)发表在《Knowledge-Based Systems》。《Knowledge-Based Systems》为人工智能领域的国际顶级期刊,目前影响因子为7.2(SCI一区Top)。论文第一作者为崔俊国副教授,通讯作者为吴磊教授,中国石油大学(华东)为第一署名单位,该研究得到国家重点研发计划、山东省重大科技创新项目、工信部高技术船舶科研项目、山东省泰山学者奖励计划等联合资助。
论文首页
作为一种广泛应用的路径规划算法,蚁群优化算法(ACO)已发展成为优化算法领域中一种成熟的方法,并被广泛应用于各个领域。
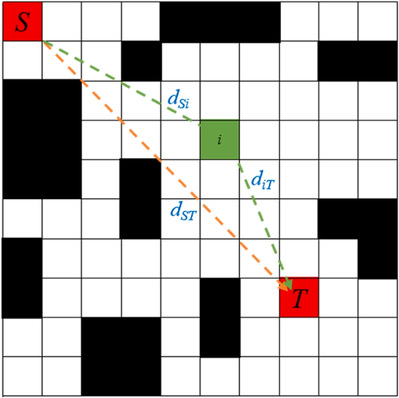
非均匀信息素初始化示意图
该研究提出了一种多策略自适应蚁群优化算法(MsAACO),通过引入方向引导机制、自适应启发式函数、确定性状态转换概率、非均匀信息素初始化4个策略改进了蚁群优化算法收敛不足和效率低下的问题。
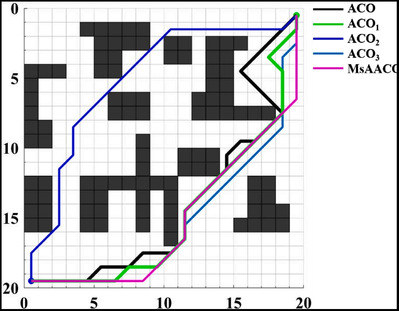
不同蚁群优化算法获得的最佳路径
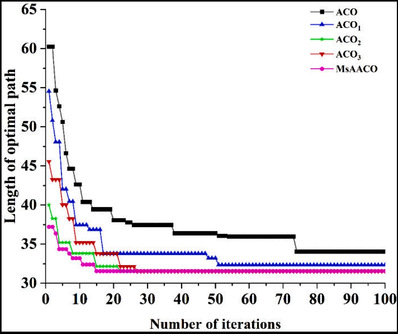
不同蚁群优化算法的收敛曲线
实验结果表明,MsAACO能有效生成长度和转弯时间更短的平滑最优路径规划解,并提高了收敛效率和稳定性。MsAACO生成的结果验证了其在解决移动机器人路径规划问题上的优越性。
论文链接:https://doi.org/10.1016/j.knosys.2024.111459
