


近日,我院张立军教授团队机械工程学科博士研究生杨宁在对轮旋压柔性路径规划研究方面取得重要进展,相关研究成果《提高往复对轮旋压的成形性:复杂柔性返程路径的动态协同》(Enhancing formability via reciprocating counter-roller spinning: Dynamic coordination of complex flexible return path)发表在《Journal of Materials Processing Technology》。《Journal of Materials Processing Technology》是材料加工与制造领域的国际顶级期刊,目前影响因子为7.5(SCI一区TOP)。论文第一作者为博士研究生杨宁,通讯作者为张立军教授和青年教师罗开广,中国石油大学(华东)为第一署名单位和唯一通讯单位,加拿大阿尔伯塔大学等为共同合作单位。该研究得到山东省重点研发计划(科技型中小企业创新能力提升工程)项目、中央高校自主创新科研计划项目和中国国家留学基金等联合资助。
论文首页
对轮旋压工艺凭借其高工艺柔性和高均衡径向力学性能的典型特征为舍弃高昂的芯模旋压的生产管理成本并扩大工艺窗口提供了巨大优势和广泛空间,但与此同时,也因丧失芯模等强支撑作用而使其成形精度偏低的工艺劣势依旧明显。因此,如何补齐成形精度低的工艺短板是研究对轮旋压工艺必须解答的热点难题。
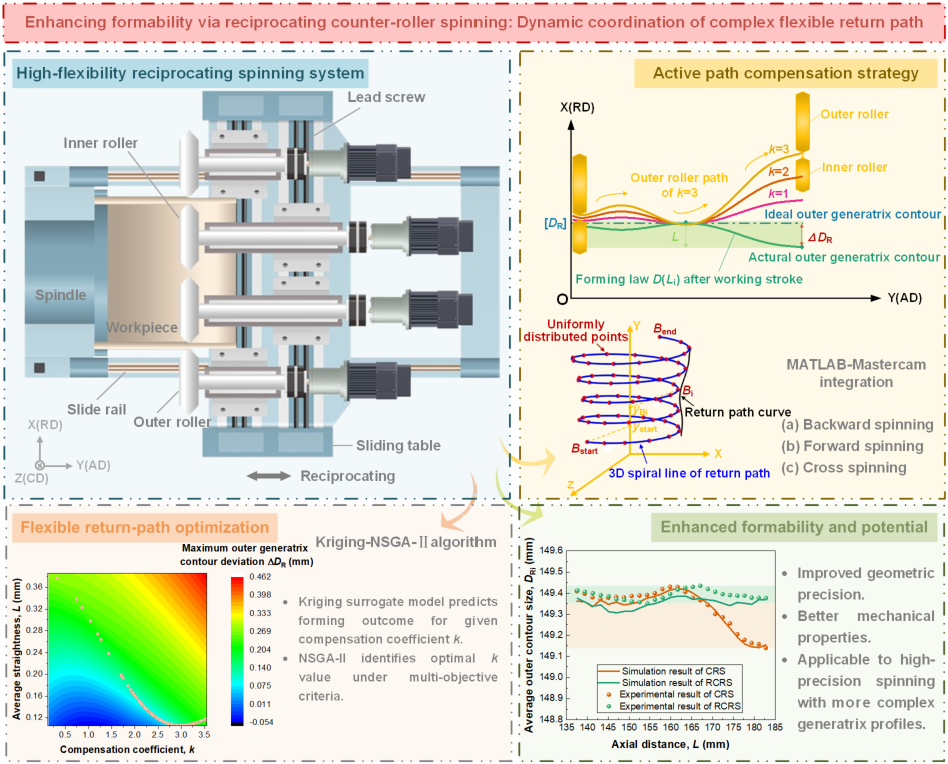
往复柔性对轮旋压工艺研究框架
为解决对轮旋压工艺“高性能与低精度难以兼得”的核心工艺矛盾问题,提出了一种融合工作路径与复杂柔性返程路径协同控制的往复对轮旋压新工艺方法,较好地突破了传统旋压路径无法校差的设计瓶颈。该方法创新性地将返程阶段从“空行程”转化为具备主动修正能力的“动态补偿路径”,充分释放了对轮旋压的轨迹柔性优势,实现了成形误差的路径级动态矫正。这为高柔性对轮旋压工艺在高精度制造领域的推广应用提供了可验证的理论机制与关键技术路径。
论文链接:https://doi.org/10.1016/j.jmatprotec.2025.118988
